- Group電装班
- Date2026.01.17
S-320 Element 電装班 設計・活動方針
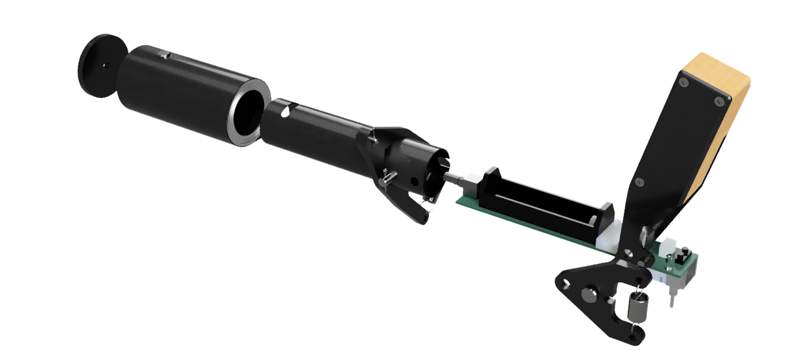
S-320 では、2 年ぶりにフライバイワイヤ(サーボモータを使用して電気制御で尾翼を動かす方式)(図 1)が採用され、例年のセンサ類に加え、操舵機構も電装班が担当します。よって、電装には、今まで以上にディペンダビリティ(求められたときに求められた通りに機能する能力)が求められます。そこで、設計にあたり以下 3 つのコンセプトを定めました。
① まず、壊れない電装を作る
② 次に、一部が壊れても別手段で動作し続けられる電装を作る
③ 最後に、完全に壊れても、5 分以内に修理できる電装を作る

全体
S-320 の電装は、上記 3 つのコンセプトに基づき、以下のシステム構成で製作します(図 2)。
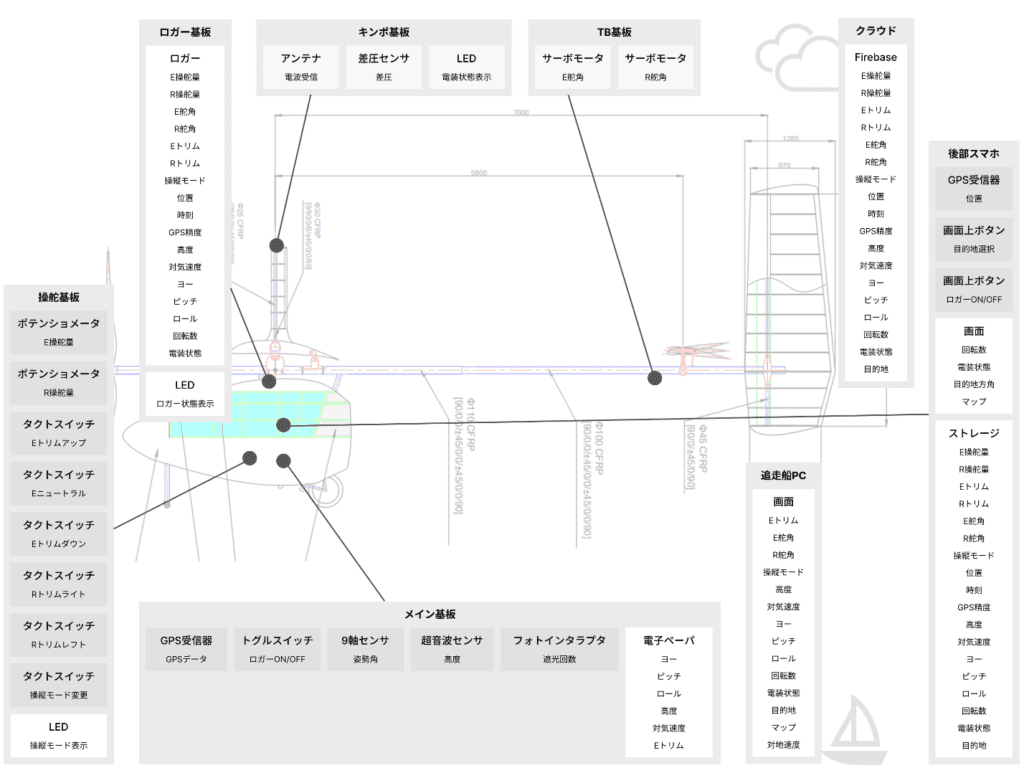
フライトログは、SD カード、スマートフォン、クラウドに重複保存し、確実にデータを保存し、設計や操縦に活用できるようにします。また、各電装機器の状態を監視する処理を導入し、ユーザに提示することで、トラブル発生個所の特定を容易にします。さらに、基板を複数に分割しモジュール化することで、トラブル発生個所の修繕にかかる時間を短縮します。
操縦桿
S-320 では、ジョイスティックを利用した従来の操縦方式を廃止し、手全体で握れる、スティックタイプの操縦桿を製作します。これにより、尾翼の繊細な角度調整が可能になり、S-300 の墜落原因の一つである、急激な機首方向の変化を抑えます。また、センタリング機構(操縦桿から手を放すと元の位置に戻る機構)に可変のバネを用いることで、パイロットの好みに応じた操縦桿の硬さを実現します(図 3)。
さらに、今年初の取り組みとして、「操縦アシストモード」を搭載します。パイロットが操縦桿に入力していない際、姿勢角計と GPS(誤差 10cm 程度)で得られたデータから、機体が直進するように尾翼を自動で調整します。これは実験的取り組みで、テストフライトでの実用性確認を目標にしています。

4 節リンク機構
S-320 では、サーボモータを尾翼の外に配置することで、トラブル発生時の取り換えを容易にします。さらに、サーボモータに風があたることで、サーボの発熱を抑えます。実験により、炎天下で動作中のサーボモータに、風速 4.7m/s の風をあてると、無風時と比較して、サーボ表面の温度が-19 度減少することが実証できました(図 4)。

また、サーボモータの設置個所変更に伴い、サーボモータの回転運動を尾翼の回転運動に変換するための、4 節リンク機構の再設計が必要になりました。
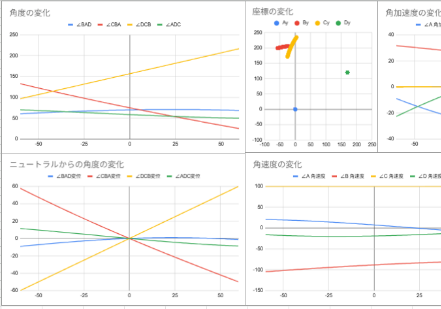
まず、4 つの節の座標と、原動節の可動範囲を入力することで、従動節の稼働範囲やトルクを解析できるシートを表計算ソフトで作成し、S-300 の 4 節リンク機構の解析を行いました(図5)。次に、このシートに遺伝的アルゴリズムを導入し、サーボモータを尾翼の外に出すという条件の下で、トルクや可動範囲が最適になる、4 つの節の座標を自動で算出し、機構の最適化を図りました。そして、得られた 4 節リンク機構が、S-300 と比較して性能に問題が無いかを確認しました。
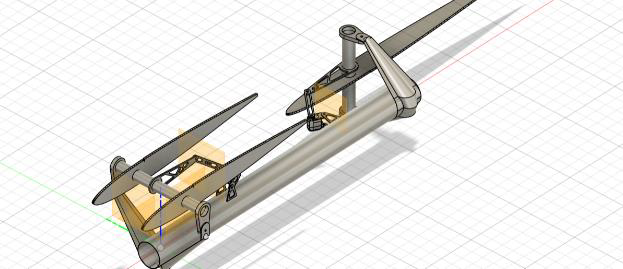
設計した 4 節リンク機構は、Fusion でモデリングし、干渉などの問題が無いか確認後(図 6)、実際に過去代の CFRP パイプや尾翼をお借りして再現し、動作に問題がなく、トルクや可動範囲が設計値通りであることを確認しました(図 7)。

尾翼可動範囲の計測
統括
S-320 電装では、上記の通り、課題解決のために、複数の挑戦的な取り組みを行います。TF や大会になってから、思わぬ欠点が見つかっては遅いため、今の段階で入念にテストし、製作を進めていきます。