
- Group電装班
- Date2025.10.22
第2回 ER試験を行いました
昨日、第2回 ER試験を行いました!今回のER試験の目的は、「サーボが本当に設計値通りのトルクまで耐えることができるか」を確認することです。
サーボモータ自体は、90kgf・cmまで耐えられるものを購入したのですが、4節リンク機構を通じて尾翼を動かす力に変換する際、この力が拡大されます(というか拡大されるように設計しました)。

上の画像でいうと、赤矢印のサーボが回転する力が、リンク機構を通じて拡大され、青矢印の尾翼が回転する力に変わります。
どのくらい拡大されるかというと、エクセル(スプレッドシート)を用いた計算では、エレベータがニュートラル(地面に対して水平な状態)で、加速度が生じていないとき(静的トルクのみの時)、422kgf・cmまでのトルクに耐えれる「はず」です。
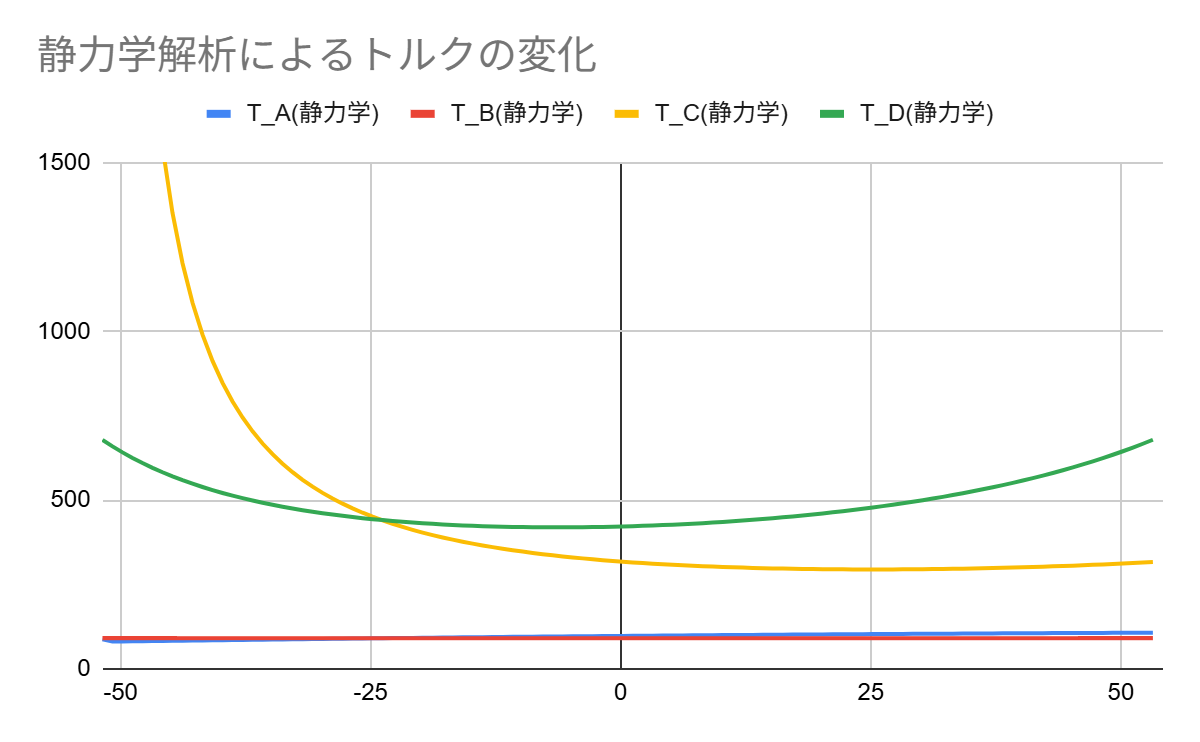
↑T_D(静力学)が、尾翼の回転軸にかけられる力で、縦軸がkgf・cm、横軸がサーボの角度(deg)になっています。
ただ!これらはあくまで設計値なので、本当にそのトルクに耐えられるのかを試そう!ということになりました。試験方法としては、エレベータの回転軸から1mのところに4kgの錘を吊り下げ、400kgf・cmのトルクをかけ、サーボが負荷に負けて回転しないか確かめます。
さらに、サーボを動かしている状態でも、錘を吊り下げ、加速度が生じている状態で、どの程度の負荷まで耐えられるのかを確かめます。
実は、第1回ER試験の時にも、このトルクをかけて耐えれるかを試す試験をやろうとしたのですが、モーメントを稼ぐための棒をφ10のいらないマンドレルにした結果、剛性が全く足りず、桁を殴るマシンになってしまったという過去があります、、、
そこで今回は、棒をCFRP製のφ20の桁に変更し、また、錘の吊り下げ方を工夫しました!
実験結果


上記画像の通り、静止状態で、見事、エレベータの回転軸から100cmのところに取り付けた4kgの錘(400kgf・cm)を、吊り下げることができました!(桁がひん曲がってモーメントが若干変わってしまっているのはご愛敬、、、)
一方、上気動画の通り、加速度が付いた状態の実験では、回転軸から100cmのところに2kgの錘(200kgf・cm)を付けた際には、サーボを動かすと負荷に負け、指定した角度まで動きませんでした。
しかし、回転軸から50cmのところに2kgの錘を移動し(100kgf・cm)、再度吊り下げて実験を行った際には、ジョイスティックの操作に応じて、エレベータがパタパタとイキよく動きました(笑)。
まとめ
今回の実験で、設計値通り、エレベータが(加速度0の状態で)400kgf・cmのトルクまで耐えられることが分かりました。
また、エレベータが動いており、加速度が生じている状態では、100kgf・cmの静的トルクには抵抗して動くことができましたが、200kgf・cmの静的トルクには負け、エレベータをアップに切ることができませんでした。
静止状態の1/4になってしまった理由として、サーボモータを動かすのにジョイスティックを使ったため、微調整が効かず、サーボが急激に動こうとし、加速度が極端に大きくなってしまった可能性を考えています。これにより、尾翼の回転軸にかかる動的トルクが増加し、(静的トルク+動的トルクの)トルクが400kgf・cmを超えたと考えられます。
実際の尾翼の操縦では、ポテンションメータで舵角を調整するタイプの操縦桿を利用するため、繊細な動きを再現でき(加速度を小さくでき(動的トルクを小さくでき))、200kgf・cmの静的トルクでも尾翼を動かせるかな??と思っています。
操縦桿の方が完成次第、またER試験をやって、テストできればと思います。
最後まで読んでいただきありがとうございました!