
- Group電装班
- Date2025.03.22
飛行機に必要な計器類の作り方
こんにちは!26代電装設計の目黒です。
最近「カーボン」という別称ができました、、、
飛行機を操縦するパイロットにとって、機体の速度や姿勢、位置情報、高度といった情報は、無くてはならない存在ですよね。

人力飛行機でもそれは一緒です!
TBTの電装班では、機体に搭載する様々なセンサ、そして、それをパイロットに表示する表示機、さらには、これらのフライトデータを保存するロガーを自作しています。
ここでは、TBTに留まらず、鳥人間界隈でよく使われている計器の種類と、使われているセンサを紹介します!
目次
機速計
その名の通り、機体の速度を計測するためのセンサです。対地速度を計測するものと、対気速度を計測するものの、二種類があります。
人力飛行機界隈では、パイロットにとってより重要な、対気速度を計測することが多いです。主に以下の三つの方法が用いられています。
プロペラ式

機体に小さなプロペラを取り付け、飛行中に風によってどの程度プロペラが回っているかを計測することで、機体の速度を算出する方式です。
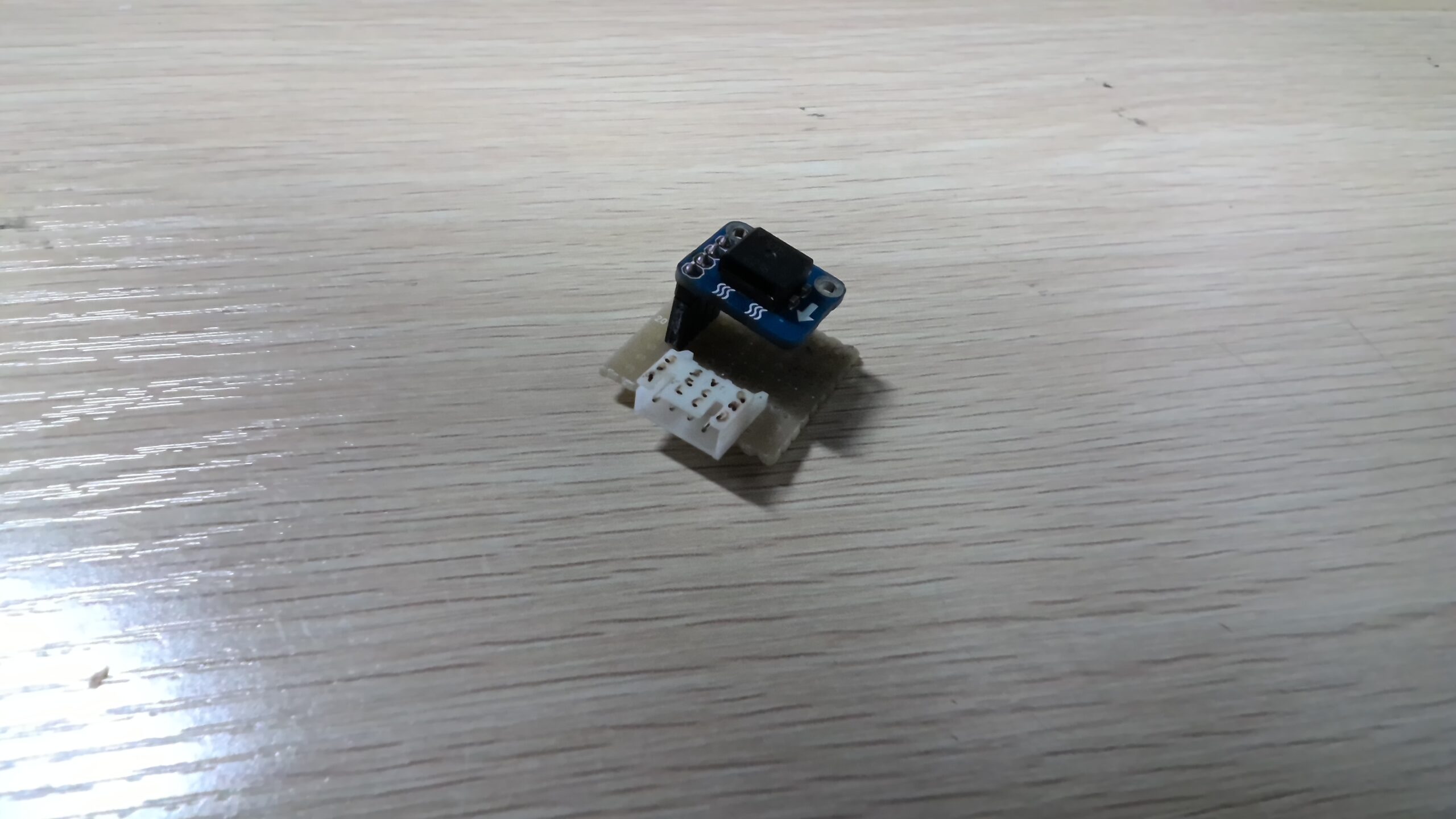
プロペラの回転数の計測には、ロータリーエンコーダやフォトインタラプタが用いられます。
流速計
機体の流れをそのまま測定できるセンサです。これを機体に取り付け、センサ中央の穴に侵入した空気の流れを計測することで、機体の速度を割り出します。
ピトー管

ピトー管では、気圧の差から速度を求めることができます。
静圧(機体回りの大気圧)と全圧(動圧(機体の進行方向からかかる圧力)+静圧)を計測し、その差である動圧(機体の進行方向からかかる圧力)を算出することで、機体の速度が分かります。
ピトー管の写真をよく見ると、先端と、側面に、それぞれ一つずつ穴が開いているのがわかると思います。先端の穴から全圧(動圧+静圧)の空気を、側面の穴から静圧の空気を取り入れ、写真上部の差圧センサで動圧を算出します。
TBTでは、以前はプロペラ式、昨年は流速計を利用しましたが、今年はピトー管に挑戦中です。ただ、現状、あまり正確な機速を取得できていないので、風洞で校正をする必要がありそうですね。。。
姿勢角計
機体の姿勢(ピッチ、ロール、ヨー)を計測するセンサです。機体がどの程度傾いているかを計測します。
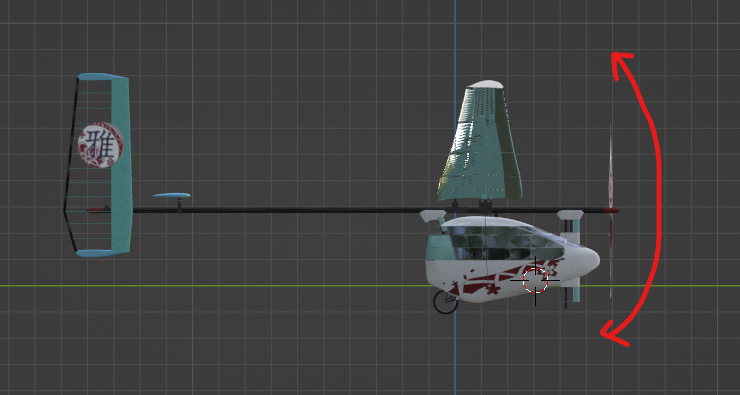
↑ピッチ
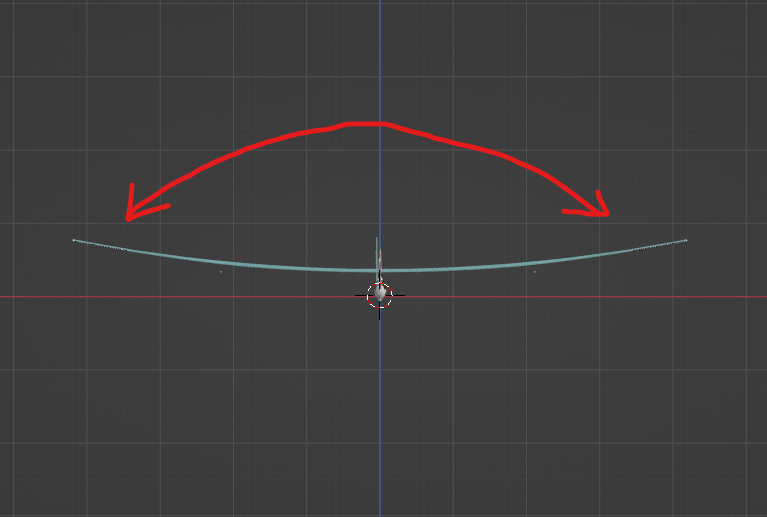
↑ロール
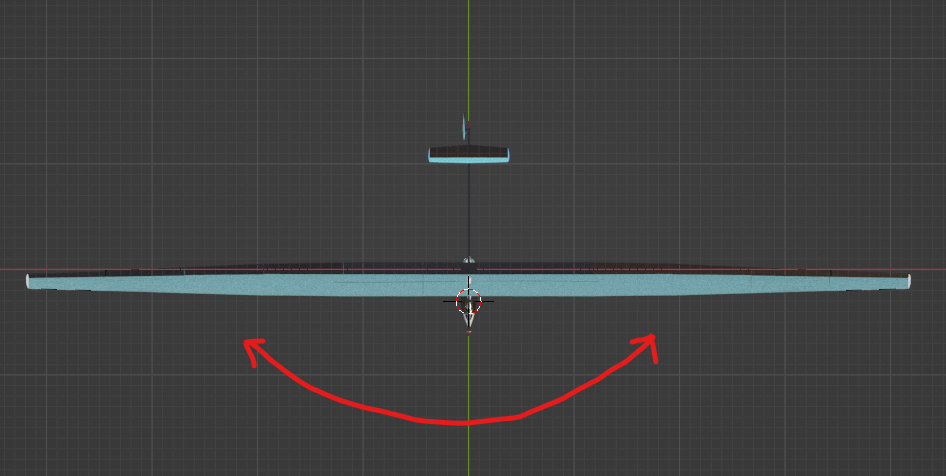
↑ヨー
これら全ての姿勢角を取得するには、X,Y,Z軸方向それぞれにおいて、加速度,角速度,地磁気を取得する必要があります。3×3の9つのデータを取得することから、9軸センサと呼ばれています。
ただ、単にこの9軸センサを搭載するだけでは、姿勢角はわかりません。得られた9つのデータを、カルマンフィルタやMadgwickフィルタといったフィルターを通して計算することで、姿勢角を求めることができます。
ちなみにTBTが使っている9軸センサは、フィルターを適用して実際の姿勢角まで算出してくれる優れものです。
高度計
機体の地面からの高さを計測する計器です。鳥人間界隈では、以下のどちらか、もしくは両方を用いて高度を取得しているチームが多いです。
距離センサ
センサーから放出された赤外線や超音波が、障害物に反射して、再度センサに戻ってくるまでの時間を計測することで、センサと障害物(地面)との距離を測定し、高さを算出するセンサです。
鳥人間界隈でメジャーな、超音波を用いた距離センサは、性能の良いものでも10m程度しか測ることができませんが、そもそも鳥人間コンテストのプラットホームの高さは10mなので、そこまで問題ではありません。

また、センサーにホーンを取り付け、超音波の方向を制限することで、10m付近でも正確に測定できるよう、工夫しているチームもあります。
気圧センサ
高度によって気圧が変わることを利用して、高さを推定する方法です。地球では、高いところほど、気圧が低くなります。気圧センサを用いて、基準高さからの気圧の変化を測定することで、高度を推定します。
距離センサと異なり、測定できる高さの制限がないというメリットがありますが、時間とともに同じ高さでも気圧が変化しますし、また、超音波センサと比べて不正確なため、超音波センサと併用する形で利用されることがほとんどです。
回転数計
こちらは、人力飛行機だからこそのセンサかと思います。パイロットがペダルを漕ぐことによって、プロペラが回転するため、その回転数を取得し、パイロットに示すことは極めて重要です(回転数が足りないと落ちちゃうからね)。回転数を取得する方法として、以下の3つがあげられます。
フォトインタラプタ
フォトインタラプタは、一般にコの字型をしており、このコの字型の「隙間」を物体が通り、一方の端から他端に向けて発せられている光を遮った回数を測定できます。
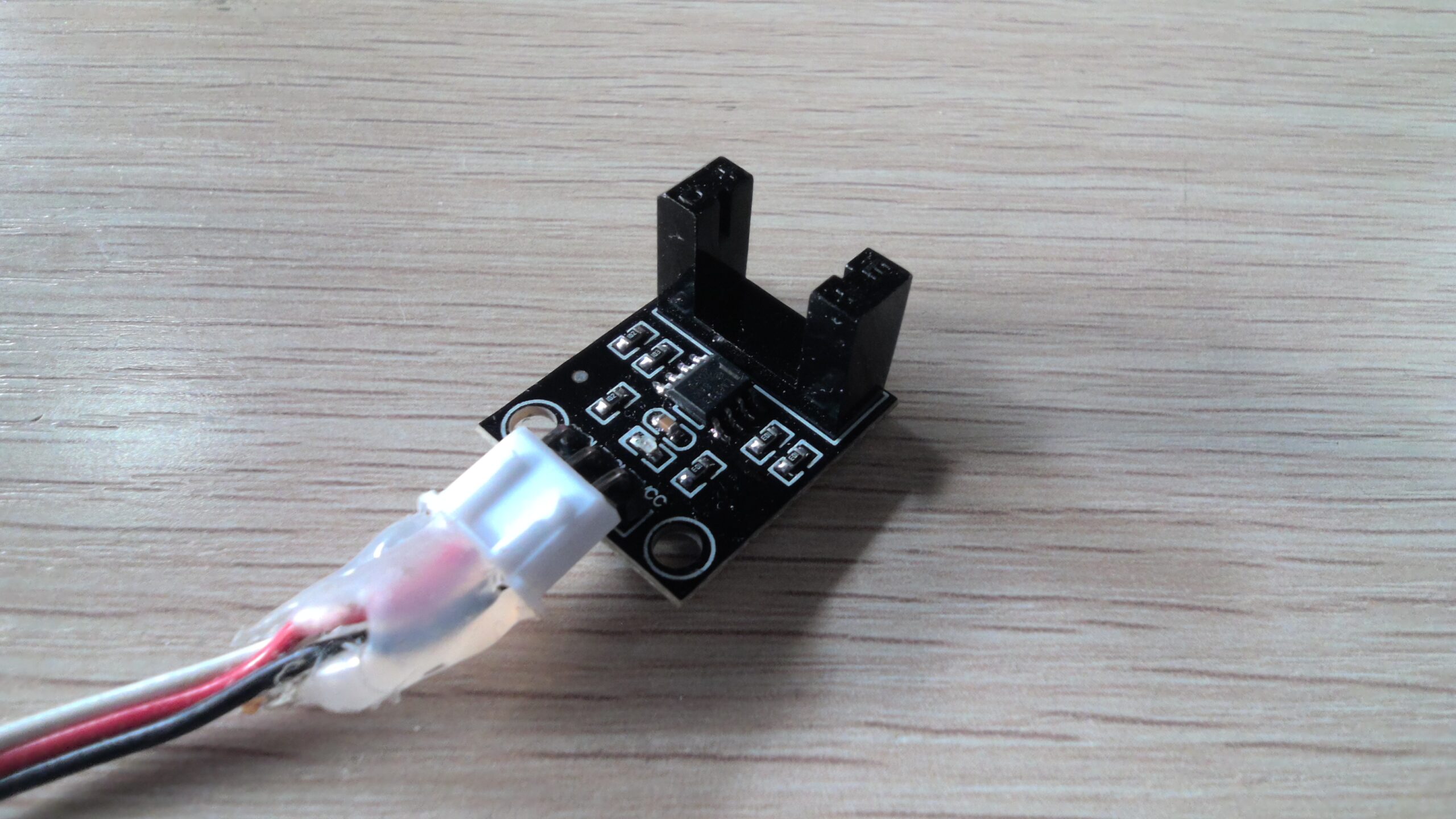
遮る物体(スリット板)は、ペダルの回転軸やドライブシャフトに取り付け、パイロットが漕ぐと、スリット板が回転してフォトインタラプタが反応するようにします。
ホールセンサ
ホールセンサとは、簡単に言うと、磁石がセンサの周囲を通り過ぎたことを検知するセンサです。例えば、ペダルに磁石を取り付け、漕ぐたびにホールセンサの前を通り過ぎるようにすれば、回転数がわかります。
ロータリーエンコーダ
ロータリーエンコーダは、回転軸の回転角度や回転速度を計測するセンサです。内部に光学式や磁気式のメカニズムが搭載されており、回転運動を電気信号に変換して出力します。これにより、機械やロボットなどの精密な位置制御や速度制御を実現します。
まとめ
今回は、鳥人間の電装界隈で頻繁に使われている計器類を紹介しました。どれも、パイロットが安心・安全に飛行するために、非常に重要な設備です。
TBT電装では、これらのセンサ以外にも、基板の設計・製作やプログラミング、表示アプリの開発を行っています。また、今年はワイヤーリンケージ(操縦桿と尾翼が紐で繋がっており、物理的に尾翼を動かす方法)ですが、昨年以前のように、フライバイワイヤといって、サーボモータで電気的に尾翼を動かして舵を取る形式もあり、こちらは電装で製作しています。
ここら辺についても、今後の活動日誌で書いていければと思います。お楽しみに!